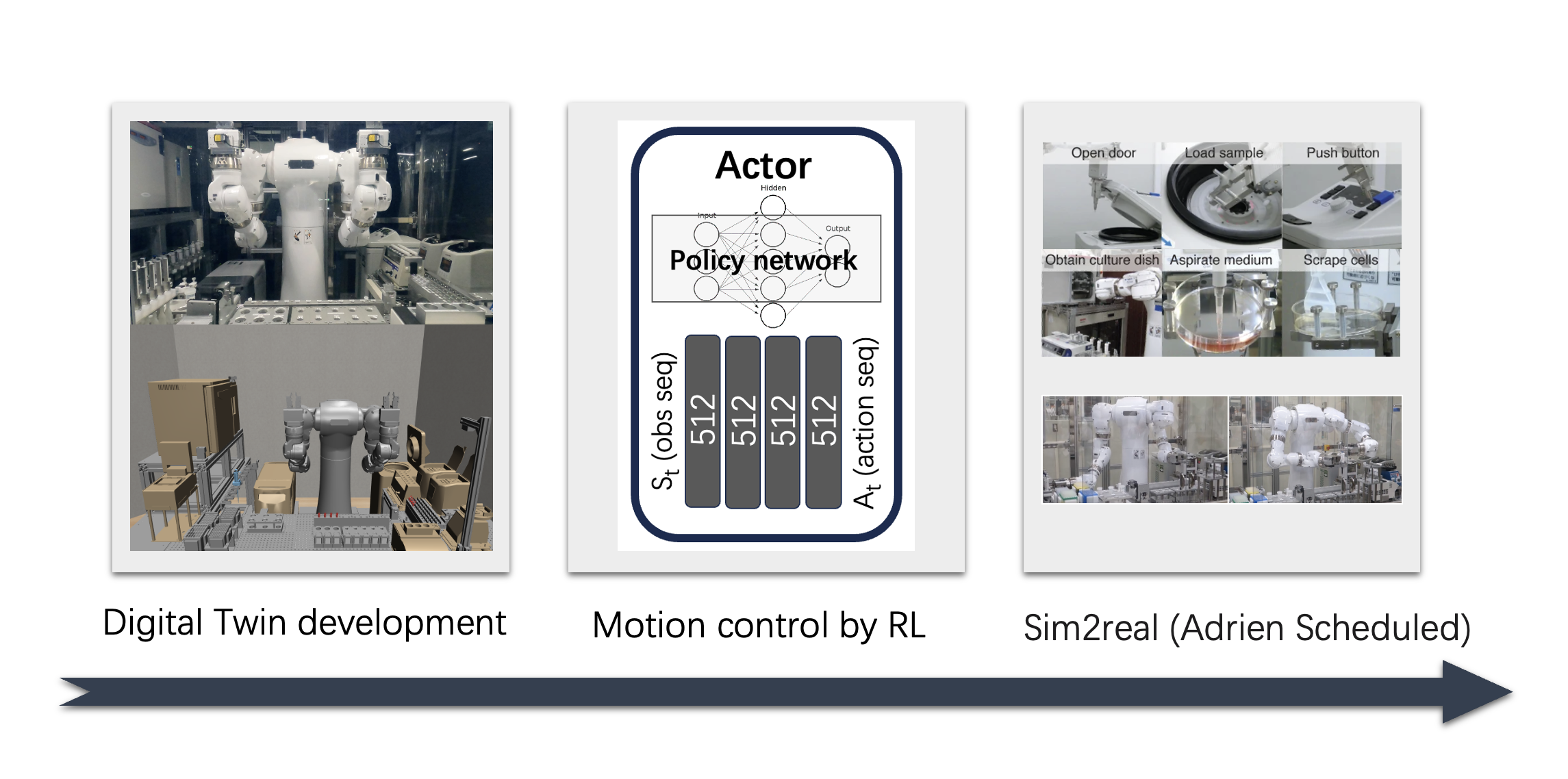
This project was commissioned from an outsourcing company to develop motion and trajectory planning algorithms for robotic arms and package them into an API for a client.
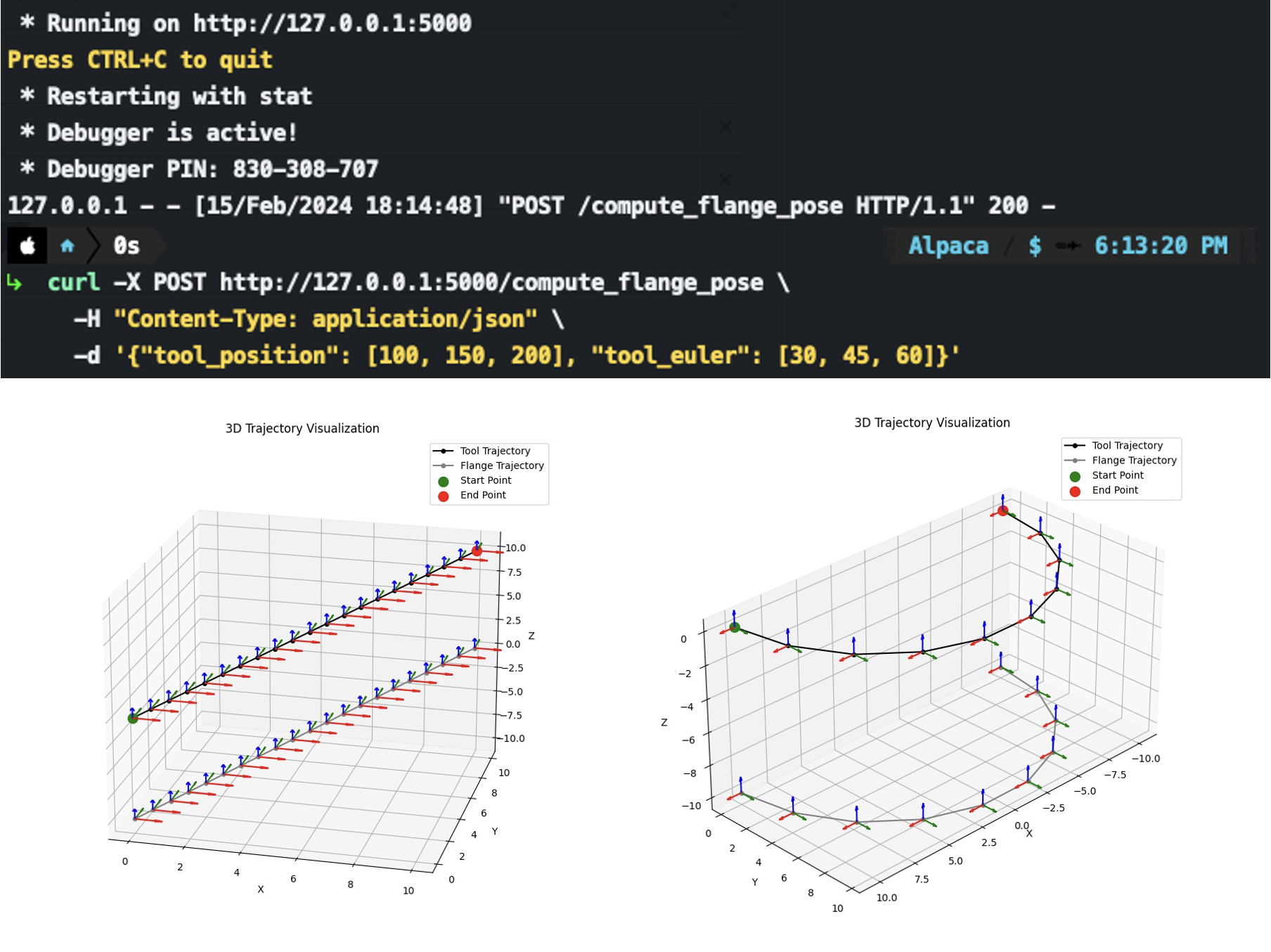
Samples of API
1. Coordinate system transformation - TCP to flange center
ComputeFlangePoseAPI( [FromBody] Dictionary
Function:
This API accepts a request for the position and Euler angle of a tool, then calculates and returns the position and Euler angle of the flange.
2. Generate Trajectory Points - Linear Trajectory
LinearTrajectory( [FromBody] Dictionary
Function:
This API takes a start and end point and returns a linear trajectory (tool and flange) from the start point to the end point.
3. Generating Trajectory Points - Curve Trajectory
CurveTrajectory([FromBody] Dictionary
Function:
This API takes the start and end points and returns a circular trajectory (tool as well as flange) from the start point to the end point.